Platform for Expanding AUV exploRation to Longer ranges (PEARL)
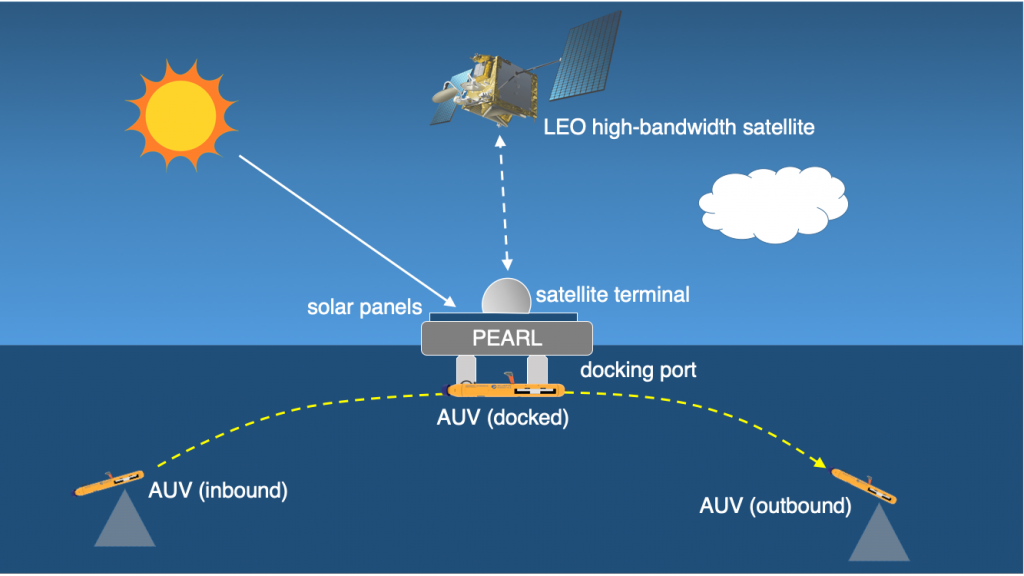
Autonomous Underwater Vehicles (AUVs) offer the ability to provide persistent and expanded ocean observations and measurements. The battery capacity of AUVs, however, currently limits the range and duration of missions. At the same time, sensor payload and ocean measurement resolution are limited by data storage space onboard AUVs. These limitations require that AUVs be frequently recovered to recharge and offload data, a process that often requires the assistance of a support vessel and crew and can cost in excess of $30,000 per day. The Platform for Expanding AUV exploRation to Longer ranges (PEARL) developed in the Engineering Systems Lab, can extend the range and endurance of AUVs (e.g. from 8 hours to 240 hours), while reducing data latency and operating costs. PEARL is an integrated autonomous floating docking station which simultaneously provides AUV battery recharging and data uplink via the new generation of high-bandwidth low- Earth orbit (LEO) constellations (OneWeb). PEARL can ensure worldwide connectivity and control of AUVs, allowing for near-real-time underwater data from across the globe. By utilizing solar power paired with integrated battery modules, PEARL can harvest power during daytime hours, allowing reliable, on-demand recharging of vehicles and data transfer, effectively extending AUV endurance and return.
To learn more about the project and the latest prototype, please visit https://followpearl.mit.edu.
Key Personnel
Olivier L. de Weck, Maha N. Haji, Johannes Norheim, Jimmy Tran (UROP), Luke Woodcock (UROP), Ari Grayzel (UROP)
Key Publications
- MN Haji, J Norheim, OL de Weck, A Framework for the Design of Renewably Powered Offshore AUV Servicing Platforms, Ocean Sciences Meeting, San Diego, CA, Feb 16-22, 2020
- MN Haji, J Tran, J Norheim, OL de Weck, Design and Testing of AUV Docking Modules for a Renewably Powered Offshore AUV Servicing Platform, submitted to the ASME 2020 39th International & Conference on Ocean, Offshore and Arctic Engineering, 2020.